


Zaprojektowane w Polsce – sprzęt, oprogramowanie oraz chmura do szybkiego prototypowania i tworzenia robotów.
Kluczowe cechy:
- System do prototypowania robotów i zarządzania nimi przez Internet.
- Dedykowany kontroler sprzętowy z wbudowanymi interfejsami czujników, serwomechanizmów, silników i enkoderów.
- Programowanie z bezpłatnymi narzędziami: online (przez Web IDE w chmurze Husarion) lub offline (rozszerzenie Visual Studio Code).
- Kompatybilność z ROS i biblioteki open-source C++ oparte na RTOS.
- Zdalna kontrola, programowanie i udostępnianie przez chmurę Husarion.
- Szybsze tworzenie robotów i większe możliwości w stosunku do Arduino czy Raspberry Pi.
Polska firma Husarion, twórca platformy do budowania robotów, wprowadza na rynek CORE2 – kolejną generację swojego kontrolera sprzętowego. Dostępny od dziś w ramach kampanii crowdfundingowej Crowd Supply kontroler umożliwia szybkie prototypowanie i tworzenie robotów konsumenckich oraz usługowych. CORE2 dedykowany jest inżynierom projektującym rozwiązania komercyjne, ale jego potencjał mogą wykorzystać również hobbyści i studenci robotyki. Kontroler może być mózgiem dla różnego typu urządzeń – od małych pojazdów penetrujących tunele, przez drony szpiegowskie, aż po wielkogabarytowe drukarki 3D.
Przystępna robotyka
Platforma Husarion sprawia, że budowanie robota jest równie proste, jak tworzenie strony internetowej. Użytkownicy otrzymują gotowy kontroler sprzętowy oraz wstępnie skonfigurowane oprogramowanie. Mogą też w łatwy sposób zarządzać swoim robotem online. Ta sama technologia i biblioteki towarzyszą inżynierom od pierwszych prototypów opartych na LEGO® Mindstorms, po dopracowane, gotowe do masowej produkcji urządzenie. Skraca to czas wdrożenia pomysłu, zmniejsza koszty i zapewnia deweloperom dużą elastyczność. Husarion podąża śladem Arduino oraz Raspberry Pi, dając użytkownikom do ręki innowacyjną platformę do tworzenia i tym samym popularyzacji robotów.
– Jesteśmy w przeddzień rewolucji w robotyce konsumenckiej – mówi Dominik Nowak, CEO firmy Husarion. – Wielkie przedsiębiorstwa produkcyjne już od dawna wykorzystują roboty, ale zwykli użytkownicy i firmy usługowe nie sięgnęły do tej pory po ich potencjał. Zaczyna się to jednak zmieniać dzięki coraz szerszej dostępności narzędzi i dojrzewaniu koniecznych technologii. Uważam, że Husarion może być ważnym graczem w tym nowym segmencie, oferując deweloperom gotowe rozwiązanie i zmniejszając tym samym barierę wejścia na rynek – tłumaczy Nowak.
Szczegóły techniczne platformy Husarion
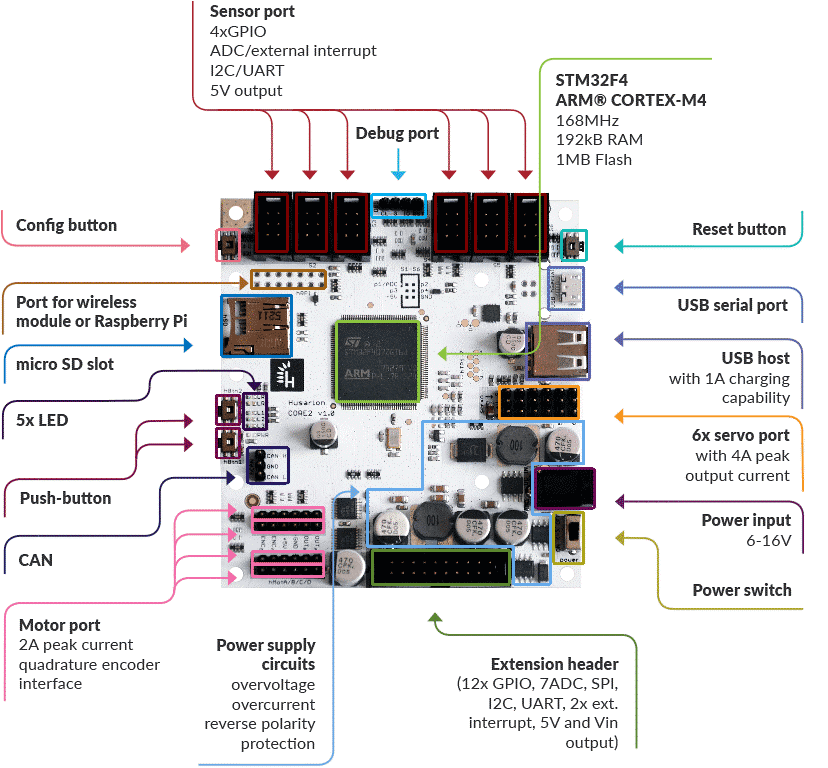
Sprzętowym filarem platformy jest płytka Husarion CORE2 – komputer z interfejsami do podłączenia silników, serwomechanizmów, enkoderów oraz czujników. Sercem kontrolera jest procesor ARM® CORTEX-M4, a na płytce znalazły się aż 42 porty I/O. Wspierają one do 4 silników prądu stałego i 6 serwomechanizmów. Za łączność bezprzewodową odpowiada wbudowany moduł Wi-Fi.
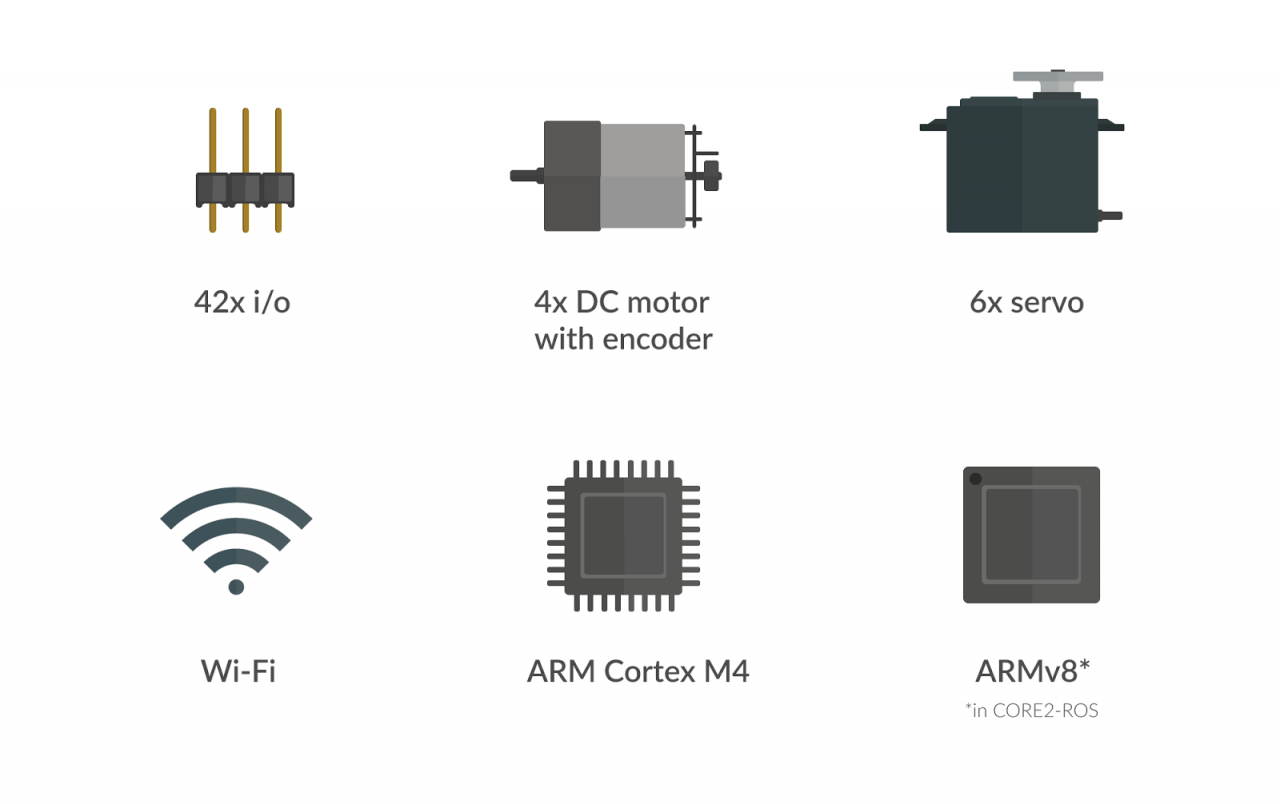
Alternatywną konfiguracją jest Husarion CORE2-ROS. Do podstawowej płytki przyłączono moduł Raspberry Pi 3 z układem ARMv8 i preinstalowaną dystrybucją systemu Linux z bibliotekami Robot Operating System (ROS). Daje to deweloperom możliwość wykorzystanie tysięcy gotowych zestawów oprogramowania i narzędzi dostępnych w społeczności ROS. Duża moc obliczeniowa oraz kontrola platformy w czasie rzeczywistym pozwalają na zastosowanie CORE2-ROS w zaawansowanych zastosowaniach, takich jak w pełni autonomiczne pojazdy.
Tworzenie oprogramowania dla robotów kontrolowanych przez CORE2 jest proste. Husarion zapewnia webowe środowisko programistyczne (Web IDE), co pozwala programować roboty online, bezpośrednio w przeglądarce internetowej. Dostępny jest też pakiet SDK do pracy offline i wygodne rozszerzenie popularnego Visual Studio Code. Autorskie biblioteki hFramework oparto na systemie operacyjnym czasu rzeczywistego (RTOS). Skomplikowaną komunikację niskiego poziomu z interfejsami sprzętowymi ukryto za przystępnym, wygodnym w użyciu API. Husarion udostępnia biblioteki hFramework w ramach licencji open-source.
CORE2 jest też kompatybilny z bibliotekami Arduino. Można je wykorzystywać bez żadnych specjalnych modyfikacji dzięki warstwie kompatybilności z API hFramework.

Zdalną kontrolę i programowanie zapewnia chmura Husarion. Rejestrując robota z układem CORE2 na https://cloud.husarion.com, deweloperzy mogą aktualizować oprogramowanie urządzenia, stworzyć własny webowy interfejs kontroli i udostępnić urządzenie wygodnym linkiem.
Kontrolery Husarion CORE2 i CORE2-ROS są już dostępne w sprzedaży za pośrednictwem platformy Crowd Supply, w cenach odpowiednio 89 i 140 USD.
Husarion oferuje ponadto pełne zestawy deweloperskie, dodatkowe kontrolery serwomechanizmów i moduły kompatybilności z systemami LEGO® Mindstorms i Makeblock®. Więcej informacji znajduje się na stronie kampanii na https://www.crowdsupply.com/husarion/core2.
CORE2 to już druga generacja kontrolera robotów firmy Husarion. Pierwszy produkt firmy, RoboCORE, z sukcesem zadebiutował na Kickstarterze w marcu 2015 roku. Husarion to firma wywodząca się z Krakowskiego Parku Technologicznego. Na zaproszenie Ministerstwa Rozwoju firma reprezentowała Polskę w strefie start-upów technologicznych na targach HANNOVER MESSE.
Specyfikacja:
|
Model |
CORE2 |
CORE2-ROS |
|
Mikrokontroler czasu rzeczywistego |
ARM Cortex-M4 @168 MHz 192 KB RAM 1 MB Flash |
|
|
Komputer jednopłytkowy |
- |
ARM-8 @1.2 GHz 1 GB RAM 16 GB Flash |
|
Łączność bezprzewodowa |
Wi-Fi, Bluetooth *ESP32 |
Wi-Fi, Bluetooth |
|
Wyjścia/wejścia serwomechanizmów |
6 |
|
|
Wyjścia silników prądu stałego |
4 |
|
|
Interfejsy enkoderów |
4 |
|
|
GPIO |
42 |
|
|
UART |
4 |
|
|
SPI |
1 |
|
|
I2C |
3 |
|
|
CAN |
1 |
|
|
Wejścia zewnętrznego ADC |
13 |
|
|
Wejścia zewnętrznych przerwań |
8 |
|
Więcej informacji:
Spodobało Ci się? Podziel się ze znajomymi!








Pokaż / Dodaj komentarze do:
Husarion CORE2: zaprojektowany w Polsce kontroler robotów już dostępny